This research has profound implications for improving the safety and precision of minimally invasive surgeries, ultimately enhancing patient outcomes and increasing the success rate. According to the National Cancer Institute (US), only for 2024, there were over 2 Mil new cases of cancer with an estimated over 611.000 deaths. One of the major increasing areas is liver cancer having over 41.000 new cases with an estimated rate of survival of 21.7% in a 5-year period.

Dr. Nedelcu Nicoleta, Ph.D.
Dr. Nedelcu Nicoleta, has a Ph.D. in chemistry and she is an expert researcher in Material Science, currently Lab Instructor at Mount Royal University (Calgary). She had a crucial role with the research team to investigate the navigation of a flexible needle into the human liver for robotic-assisted surgical therapy as part of the IMPROVE project. This cutting-edge research focuses on navigating a flexible needle into the human liver, incorporating advanced elasticity theories to improve surgical outcomes. Elasticity theory is applied to describe the interaction between the needle and the human liver. Based on the success of the project 11 patents have been registered. Previously Dr. Nedelcu received an Academic Award and authored the book “Thin Films-Process and Characterization Techniques”
This advanced theory incorporates the local rotation of points and the couple stress (torque per unit area) in addition to the force stress (force per unit area), effectively capturing the chiral and microstructural features of the human liver.
Results indicate that considering smaller deformations in both the needle and the liver enhances the needle navigation mechanism. Additionally, the geometry of the needle plays a critical role in improving penetration efficiency. A novel suggestion is made to utilize flexible bee-inspired needles as practical tools for transporting drugs into liver tumors, further enhancing needle navigation performance. The insertion trajectory of the needle must avoid ribs, blood vessels, and other organs to protect the liver and surrounding anatomy. The bee needle offers distinct advantages, such as reduced insertion forces and minimal tissue deformation.
In this context, imaging tumor location, understanding the liver structure, and evaluating microstructural interactions between the needle and the liver is crucial. The flexibility of the needle is essential for achieving high precision, as strain and stress concentrations and topological changes in the liver must not be neglected during needle navigation. Detailed studies on forces during needle insertion, real-time collision detection for virtual surgery, and hierarchical collision detection are provided alongside optimization techniques to modify the needle trajectory for liver protection, tumor management, and robotic system design.
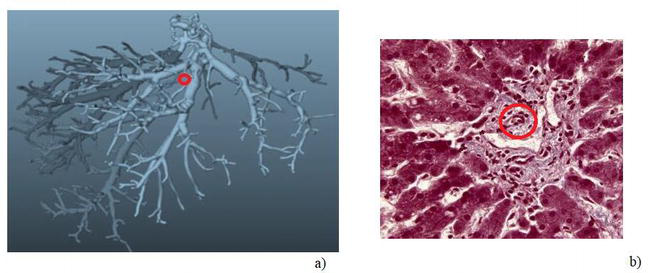
Microscopic investigations of the human liver reveal its intricate microanatomy, highlighting granular and fibrillar components and irregular solid-fluid interfaces. The basic functional unit of the liver, the hepatic lobule, comprises a hexagonal structure with a portal triad—portal vein, hepatic artery, and bile duct. These lobules form a two-layered membrane with internal spaces measuring approximately 100 Å.
During research to visualize the strain profile of the needle, we chose two routes For the first route the tumor is red and the entry point is A. The second route is restricted by the presence of blood vessels that should not be touched and has the tumor (blue) with entry at point B.
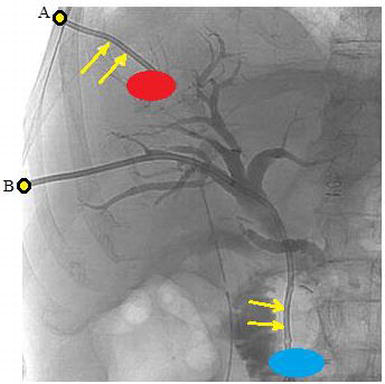
A straight-line trajectory is traditionally used for needle insertion in liver tumor treatments. However, avoiding obstacles and reaching regions inaccessible via straight-line trajectories necessitates motion planning algorithms for flexible needle insertion. These algorithms must integrate advanced human liver models, incorporating the interaction forces generated during needle insertion. The needle trajectories inside the liver must also be recorded using cameras to compare experimental and simulated trajectories, ensuring errors remain below 0.8 mm.
The tumor image seen on the microscope shows white and gray denote forbidden areas while the shades of purples are safe regions. The tumor is drawn in red. The Fibonacci algorithm is applied to three needles with restrictions to avoid the collision with the tissues, blood vessels, ribs and previously inserted needles.
Developing robotic systems and control algorithms is essential for enhancing needle steering. Mechanics-based models, adapted from beam theories, account for the coupled deflection of the needle and deformation of the liver tissue. Recent advancements include 3D needle shape reconstruction using fiber Bragg grating sensors and innovations in guiding devices for precise needle placement and percutaneous computed tomography-guided surgical activities.
Despite significant advancements, two critical challenges persist: understanding the material composition of the liver and the interaction mechanisms between the needle and the liver. This study combines results on the elastic properties of the human liver, the deformation of both the needle and the liver, and the potential of chalcogenide materials in the context of needle navigation.
Chalcogenide materials, known for their unique optical and mechanical properties, may offer innovative solutions in systems and enhanced imaging capabilities during needle navigation. By incorporating these materials, researchers can further optimize the needle navigation mechanism, reducing tissue damage and improving precision in the intraoperative treatment of liver cancer.
Sources:
https://www.cancer.gov/about-cancer/understanding/statistics
https://seer.cancer.gov/statfacts/html/livibd.html
https://www.nature.com/articles/s41598-021-89479-8
https://www.intechopen.com/chapters/75537
https://cester.utcluj.ro/improve/en/achievements.html